
Nuwa-F135
Nuwa-F135
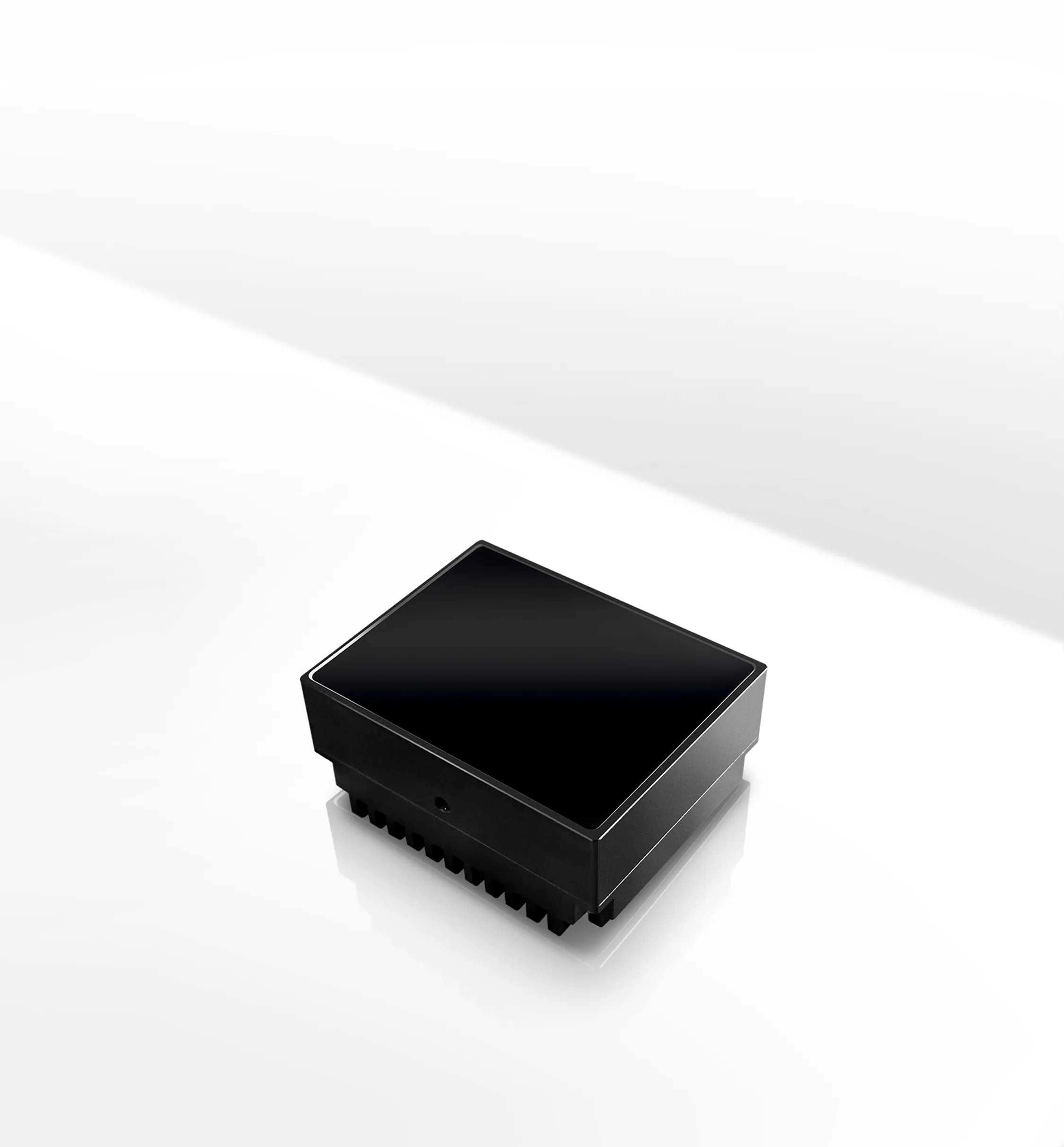
Nuwa-F135原深相机是利用结构光3D成像技术获取深度图像,满足机器人导航、避障,深度信息建模,手势控制,人体扫描,动作捕捉等不同人机交互功能。内置高清RGB摄像头满足纹理贴图、物体识别、视频监控等应用需求。
Nuwa-F135原深相机尺寸小巧、紧凑,USB3.0标准输出接口,易于集成,为系统集成商提供了灵活性,可适配室内强光弱光逆光顺光等复杂环境。
高测距精度
搭配玲珑L2专业深度计算芯片和算法,精度领先业界水平
提升机器人小物体检测、窄通道避障等性能
感知能力强
深度计算处理采用专用芯片
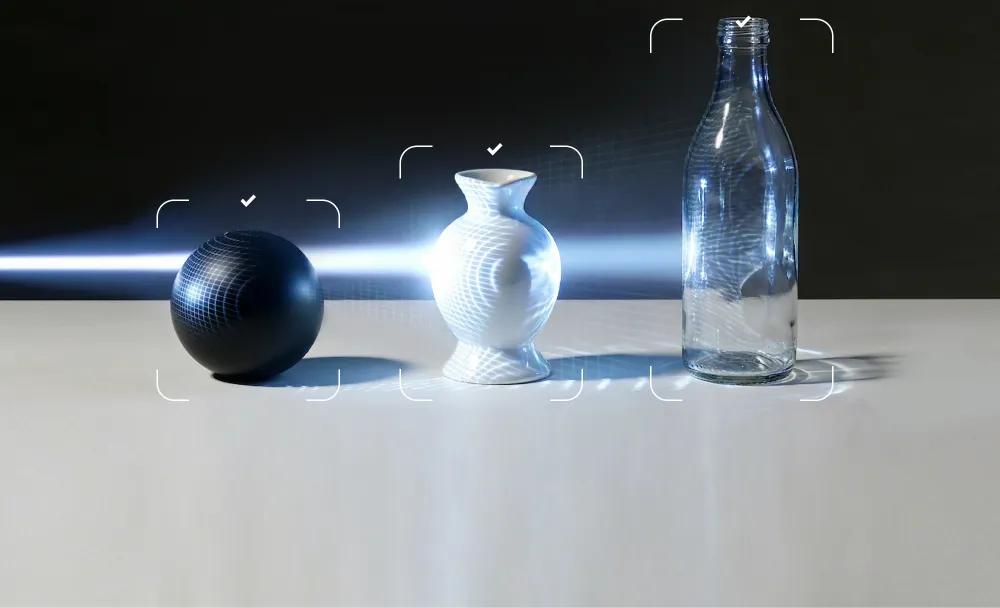
匹配双目结构光算法优化黑色、高反射、半透物体感知

高环境适应性
-20~50℃宽温工作,940nm 波长
良好的抗环境光和灰尘干扰性能

深度图像水平大FOV
深度图像水平方向FOV 135.0°
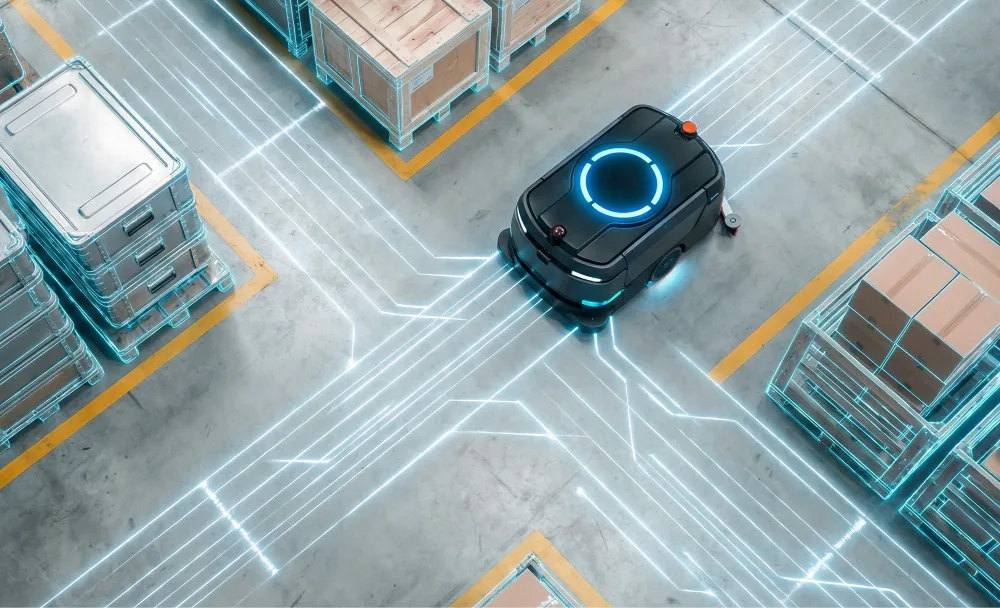
满足机器垂直大FOV场景,特别是AMR等底板机器人
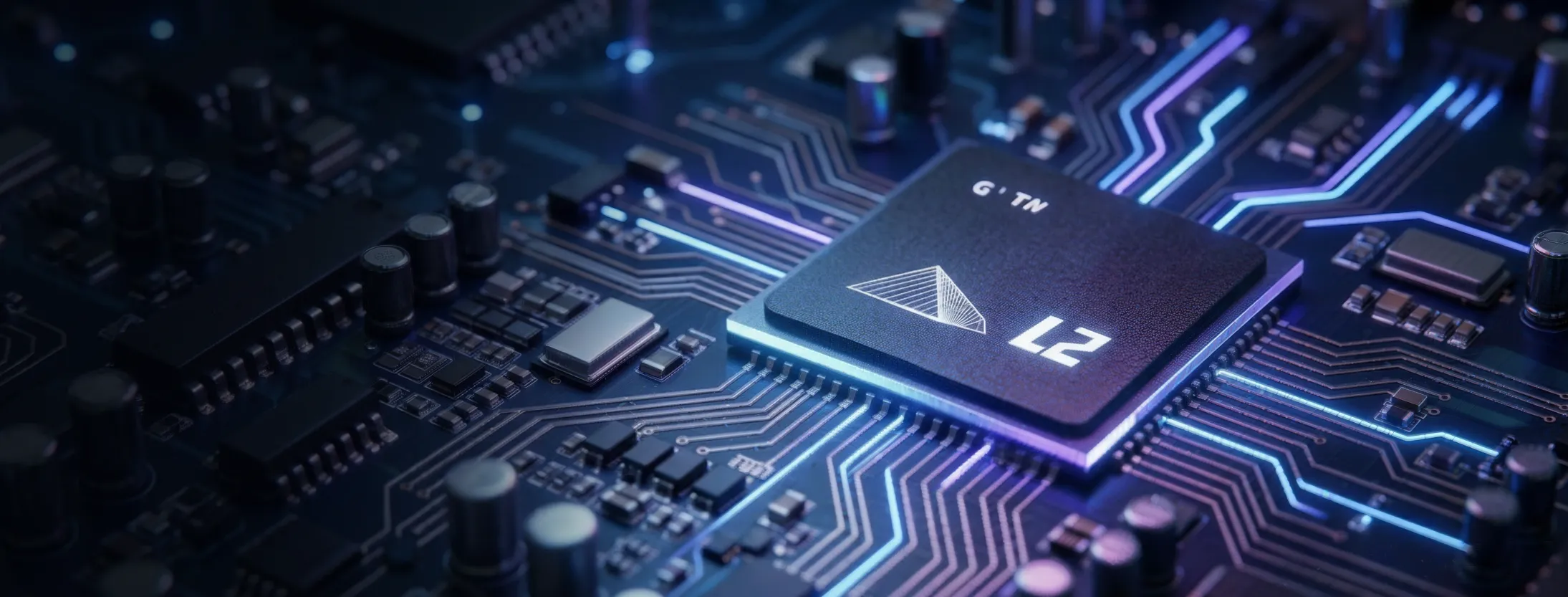
玲珑
L2安思疆自研深度引擎ASIC芯片
支持单目结构光/双目方案,安思疆最新一代双目结构光相机已全线搭载玲珑L2,可完美解决机器人工作的各种运行环境。
- 最高支持1280*960@45fps深度图输出
- 支持USB 3.0
- 集成主动+被动成像混合3D深度成像
- 能在强光到全黑各种光照条件下稳定输出高质量深度数据
- 高返、黑色、小物体等机器人痛点场景能稳定输出高质量深度数据
- 强大的深度计算能力和CPU处理能力,降低系统延迟和主机算力要求
适配场景案例
PRODUCT USAGE SCENARIO CASES
工厂仓储机器人

服务机器人

人体扫描

动作捕捉
工厂仓储机器人
服务机器人
人体扫描
动作捕捉
工厂仓储机器人
服务机器人
人体扫描
动作捕捉
产品尺寸
44.0mm×56.0mm×25.0mm
功耗
<2.5W
接口
Type C USB 3.0
工作距离
0.15~4m
工作温度
-20~50℃
储存温度
-30~80℃
工作湿度
0~90%RH
供电方式
USB
VBUS
4.75~5.25V
纹波噪声
<150mV
平面精度
<3mm@1000mm
填充率(中间81%面积)
>99.5%@1000mm
A相机分辨率
640×400@10fps
A相机FOV
H74.6°×V50.9°
B相机分辨率
640×400@10fps
B相机FOV
H74.6°×V50.9°
拼接后FOV
H135.0°×V50.9°